Engineeringa자동식 농업 기계의 자율 등급 분류에 관한 연구 남규 � 히로시 i남·규쵸루), 김용주(김·영주), 돈학 이칭(김·하쿠인)돈학 이칭(김·하쿠인)4전체 찬우(정·찬우)돈 완수(김·원스)2*해당 저자:*****@***ac.kr요약 노상 자동차 분야에서는, 자동 운전 기술 수준은 SAE International이 제안한 J3016에 따라서 정의되고 있습니다. 그러나 농업 기계 분야에서는 자동 운전 기술 수준별 표준화된 분류가 아니라 국가와 제조업자별로 다른 기준이 적용되며, 농업 기계의 자동 운전 기술을 명확하게 정의하고 정확히 평가하기는 어렵다. 본 연구에서는 SAE International J3016을 변경하고 코사쿠 일정, 수확 등 다양한 농업 운영을 더 잘 특성화함으로써 자율 농업 기계(ALAAM)의 자율성 수준을 분류하는 방법을 제안한다. ALAAM은 직선과 곡선 경로 구동, 경로&설치 운영, 운영&환경 인식 오류 대응 등 농업 업무의 자동화와 관련된 항목별로 운영자와 자율 시스템 개입의 현황에 따르고 0(수동)~5(완전 자동화)의 6단계로 분류된, 그리고 작업 지역 계획. ALAAM분류의 핵심은 농업 기계의 자동화를 위한 운영자와 자율 시스템 사이의 상대적인 역할에 기초하고 있다. 제안된 ALAAM은 자주식 농업 기계의 자동 운전 수위를 분류하는 기준의 확립을 촉진할 것으로 기대된다. Keywords:agricultural machinery, autonomous technology, autonomous driving, autonomous operation, autonomous level classification Introduction전 세계적으로 사용자의 편의성을 확보하고 운전 조작 개입을 최소화하기 위하여 차량의 자율주행 기술에 대한 관심이 지속적으로 높아지고 있다(Jeong et al., 2019). 자율주행 기술은 효율성이 높을 뿐만 아니라 운전자의 피로, 질병 등으로 인한 주의가 필요할 때 주행의 주요 기능을 담당함으로써 안전성을 확보할 수 있다는 이점이 있다(Fagnant and Kockelman, 2015). 이러한 자율주행 기술은 4차 산업혁명에 따라 인공지능, 빅데이터, 사물 인터넷, 고성능 센서 등과 같은 요소기술들의 개발 가속화로 인해 더욱 빠르게 개발되고 있다(An and Park, 2018;Kim et al., 2020b). 이때까지 자율주행 기술은 보급 대수가 가장 많고 산업 규모가 큰 자동차 분야에 활발히 적용되어 왔으나(Han et al., 2019a), 최근 자동차뿐만 아니라 건설기계 및 농업기계 등 다양한 산업분야에 확대되어 적용 중이다(Jeong and Cho, 2020;Kim et al., 2020a). 자율주행 기술이란 직접적인 수동 물리적 제어 또는 운전자의 감시 없이도 차량이 주행할 수 있도록 하는 기술을 의미하며, 자율주행 차량은 특정 자율주행 기술 레벨을 갖춘 차량을 의미한다(Lee et al., 2021). 자율주행 차량의 성능 및 안전 등을 평가하기 위해서는 차량에 장착된 자율주행시스템의 기술 수준을 동일한 지표를 통해 평가해야 하며, 이때 필요한 것이 자율주행 기술 레벨이다. 자동차 분야의 자율주행 기술의 레벨은 2013년 5월 미국 도로교통안전국(National Highway Traffic Safety Administration, NHTSA)에서 처음 제시 하였으며, 기술 레벨을 0부터 4까지 5단계로 구분하였다(NHTSA, 2013). NHTSA가 자율주행 기술 레벨을 제안할 당시에는 자율주행 기술이 구체적이지 않았으므로, 이를 보완하기 위하여 2016년 9월 국제자동차기술자협회(Society of Automotive Engineers International, SAE International)는 자율주행 표준’SAE J3016’에서 자동차 분야의 자율주행 레벨을 0부터 5까지 6단계로 세분화하는 것을 제안하였다(SAE international, 2016):1)Level 0:비자동화, 2)Level 1:운전자지원, 3)Level 2:부분 자율주행, 4)Level 3:조건부 자율주행, 5)Level 4:고도 자율주행, 6)6)Level 5:완전 자율주행. SAE에서 제안한 자율주행 레벨은 현재 미국 교통부(Department of Transportation, DoT)및 UN(United Nations)산하 자동차 안전기준 국제조직포럼(UN/ECE/WP.29)의 자율주행자동차 전문가그룹과 세계자동차공업협회(International Organization of Automobile Manufacturers, OICA)에서도 공식적으로 채택하여 사용하고 있어 전 세계적으로 SAE기준인 6단계 레벨 구분으로 통일하는 추세를 보이고 있다(Gho and Kim, 2019). 독일은 연방도로교통청(Bundesanstaltfür Straßenwesen, BASt)은 자율주행시스템에 대하여 다음과 같이 자율주행 기술 정도에 따라 5단계로 구분하고 있다:1)운전자의 주행 단계, 2)주행보조 단계, 3)일부자동화 단계, 4)고도자동화 단계, 5)완전자동화 단계. 독일 BASt의 자율주행 기술 분류는 SAE자율주행기술과 그 구별단계에서 용어상의 차이가 나타날 뿐 대부분 유사한 것을 알 수 있다. Table 1은 주요 기관에서 제안한 자율주행 기술 레벨에 따른 기술 분류이다.Blanquart et al., 2020, 애물지감장계지행업감외해농(Stentz et al., 2002;Christiansen et al., 2016;Li et al., 2020;Kise et al., 2005;Tian et al., 2016;Teng et al., 2016), 로경종추도수어출은다로제속검주물경술작기율기자,, fkbl(), stal), 종지 et;al201220062015수도 rietetang(mo(, 현재는 기존에 개발된 자율주행 기술의 고도화를 허브로 만들기 위한 연구가 많이 수행되고 있다. 특히, 북유럽 및 북미 지역에서는 자율주행을 허브로 만들기 위한 경로 안내(Navigation-Assist)및 자동 조향(Auto-Steering)제품이 이미 보급되어 활발히 사용 중이며, 세계 최고 기술을 보유하고 있는 미국 존디어사(JohnDeere)의 경우 작업기 제어까지 가능한 수준의 자율주행 기술까지 상용화를 진행하고 있다. 반면에, 국내 자율주행 농업기계 기술은 자동조향 수준으로 국내 제조사에서는 자동조향 기술을 탑재한 일부 농업기계(트랙터, 이앙기 등)를 출시 하고 있으나 아직까지 해외 선진사 대비 실용화 정도는 낮은 상태를 보이고 있다(Kim and Kim, 2018). 현재 국내 농업기계 자율주행관련 연구는 대부분 경로 계획(Song et al., 2015), 작업 환경 인식(Seo et al., 2011;Back et al., 2020), 경로 검출 및 생성(Lyu et al., 2018;Kim et al., 2020b), 경로 추종(Han et al., 2015;Han et al., 2019c, Jeon et al., 2021), 장애물 감지(Song et al., 2020), 작업기 제어(Han et al., 2019b)와 같은 연구들이 활발히 진행되고 있다. 농업기계 분야에 자율주행 기술을 적용하고 기술 수준을 정확하게 평가하기 위해서는 자동차 분야의 자율주행 레벨과 같은 농업기계 분야만의 자율주행 기술 레벨에 대한 정의가 필요하다. 하지만, 아직까지 자율주행 농업기계 레벨에 대한 표준 및 규격 등은 국내뿐만 아니라 국제적으로도 제정되어 있지 않으며, 현재 농업기계 자율주행 기술 레벨에 대하여 국가별, 제조사별 기준이 각기 다른 수준을 정의하고 있다. 따라서, 농업기계분야의 보다 명확하고 통일된 자율주행 기술 수준에 대한 분류를 위하여 표준화된 기술 레벨 정의가 필요한 실정이다. 본 연구는 농업기계의 자율주행 기술 수준과 주요 농작업에 필요한 항목별 제어 주체에 따른 자율주행 기술 레벨을 제안하기 위하여 수행되었다. 본 연구에서는 자율주행 기술에 대하여 연구가 가장 활발히 수행되고
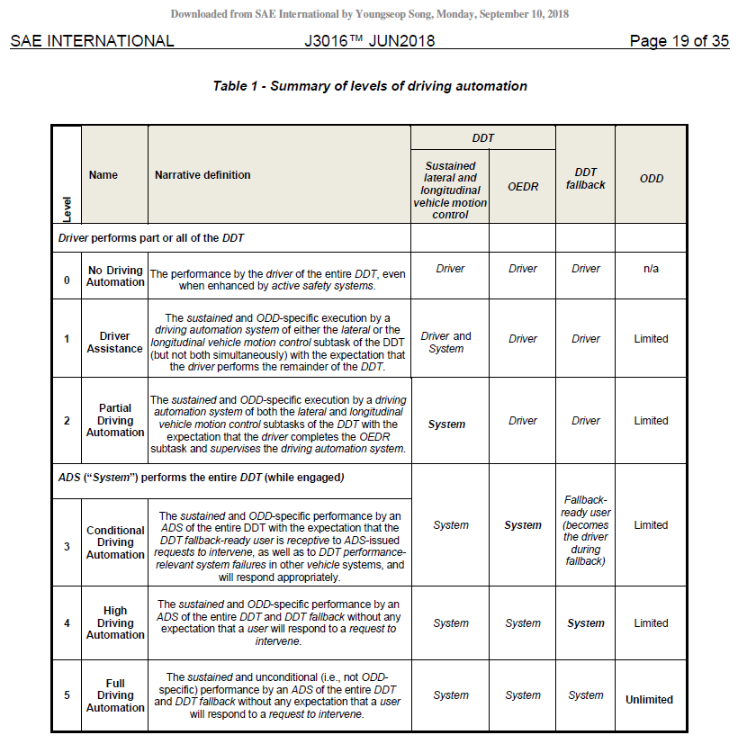
노상차량 자율주행기술 수준분류(SAE J3016)
노상차량 자율주행기술 수준분류(SAE J3016)
인기글





LevelBAST(독일)NHTSA(USA)SAE J3016(International)0드라이버만 자동화 없이 자동화 없이 자동화 1AssistedFunction너는(혹은 고유의 자동화 Assisted2Partialautomation복합 기능 자동화 Partialautonomous3-자동화 제한된 자동 운전 조건부 자동화 4완전 자동화 완전 자동 운전-자동화 5-완전 자동화
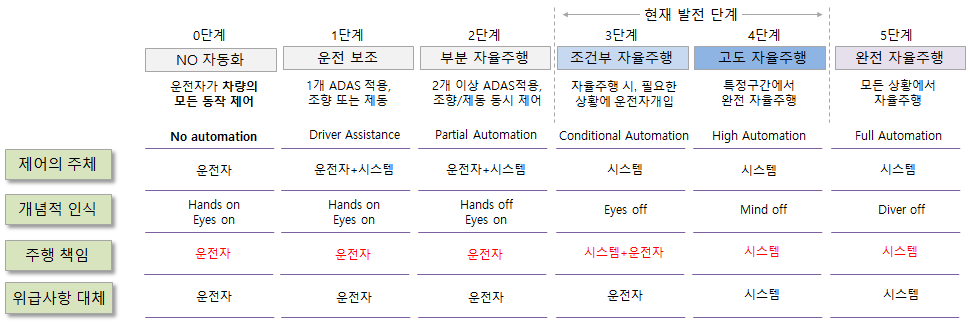
표 2. 노상 차량 자율 시스템의 레벨 분류에 따른 특성(Wevolver, 2020).
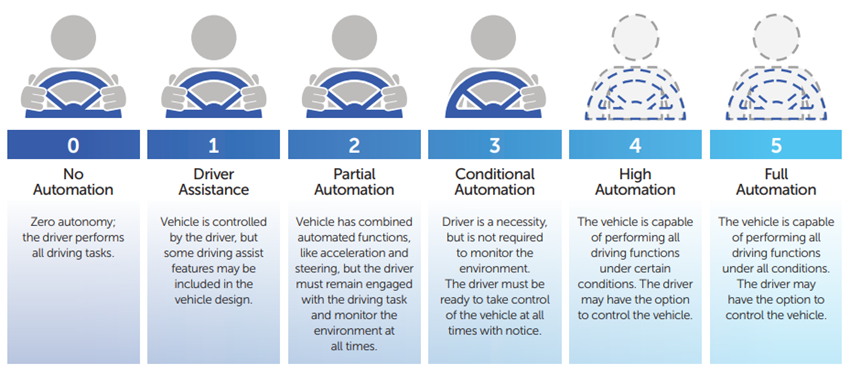
레벨분류 012345 Term 자동화 없음 드라이버 지원 부분자동화 조건부 자동화 고도의 자동화 완전자동화 제어 연산자 인적/시스템 시스템 책임 휴먼휴먼/시스템 시스템 작동상태 올온풋오프 핸드오프 아이즈오프 마인드오프 올오프 올오프

표 3. 자율형 농기계 수준별로 정보를 입력합니다.LevelParametersContents1운영자 정보 농업인 정보 농업인 정보 농작물의 종류 농지 정보(장소, 토양 등)2기기 정보 기계 정보(기종 이름, 규격, 사양)선회 반경 회전 감도 GPS보정(GPS수신기 위치)구현 정보 실장 정보(모델명, 표준, 사양)장착 방법(견인, 장착, 반 장착)GPS보정(GPS수신기에서 엔드 포인트 실장까지 거리)4패스 계획 및 추적 방법 패스 설정(직선 트랙, 곡선 트럭)경로 변경 기능(스티어링 방식 등)5곶 정보 경계 설정 곶의 설정Level Parameters Contents1 오퍼레이터 정보 농업자정보 농업자정보 농작물의 종류 농지정보(장소, 토양 등) 2기기 정보 기계정보(기종명, 규격, 사양) 선회반경 회전감도 GPS 캘리브레이션(GPS수신기위치) 실장정보(모델명, 표준, 사양) 장착방법(견인, 장착, 반장착) GPS 캘리브레이션(GPS수신기로부터 엔드포인트 실장까지의 거리) 4패스 계획 및 추적방법 패스 설정(직선트럭, 곡선트럭) 경로변경기능(스티어링방식 등) 5곶의 설정그림 1. 노상 차량의 동적 운전 태스크를 나타내는 운전 태스크의 개략도(SAE International, 2016).그림 2. 농기계 자율시스템의 개략도.그림 3. 자율형 농기계의 수준 분류.인용이 필요하신 분은 학술연구정보서비스 riss.kr 에서 namkyuchul로 검색해주세요.